Festo yeni biyonik projelerini tanıtıyor: BionicSoftHand, BionicSoftArm ve BionicFinWave Kavrama, tutma veya çevirme; dokunma, yazı…
Doğadan esinlenen eşsiz hareket formları

Festo’nun Biyonik Öğrenme Ağı’ndan yeni projeler için doğal modeller, flik flak örümcek ve uçan tilki cinsi yarasadır.
Flik flak örümcek gibi yürüme ve yuvarlanma – BionicWheelBot, yerde şaşırtıcı şekillerde hareket eder. Festo, örümceğin kaşifi Profesör Ingo Rechenberg, başında bulunduğu ekiple birlikte, bu eşsiz hareket şekillerini çok yakından inceleyerek bu modeli teknik olarak gerçekleştirdi. Bir yarasa türü olan uçan tilki BionicFlyingFox, 2,28 metre kanat açıklığı, bir hareket izleme sistemi ve otomatik öğrenmeyle mümkün hale gelen kısmen bağımsız akrobasi hareketleriyle oldukça etkileyicidir.

BionicWheelBot: bisikletçi örümcek modelinde benzersiz hareket çeşitleri
Bisikletçi örümcek 2008 yılında, biyonik uzmanı Prof. Ingo Rechenberg tarafından Sahara kenarında keşfedildi. Tıpkı diğer örümcekler gibi bisikletçi örümcek da koşabiliyor ama bir dizi takla atarak ve yerde yuvarlanarak da ileri doğru hareket edebiliyor. Prof. Rechenberg bu örümceği keşfettiğinden beri, bu hareket dizilerini teknolojik uygulamalara aktarmak için çalışıyor. Kinematikler ve tahrik konsepti Festo’nun biyonik ekibi ile işbirliği yapılarak geliştirildi. BionicWheelBot gövdesinin her iki yanında yer alan, üç uzun bacağa sahip bir tekerlekle yerde yuvarlanıyor. Koşu esnasında geri çekilen iki bacak, dönme hareketi için uzuyor. Örümcek top gibi yuvarlanırken bu bacaklar yeri itiyor ve sürekli dönme hareketi esnasında ileri doğru yol alıyor.


BionicWheelBot: bisikletçi örümcek modelinde benzersiz hareket çeşitleri
Bisikletçi örümcek 2008 yılında, biyonik uzmanı Prof. Ingo Rechenberg tarafından Sahara kenarında keşfedildi. Tıpkı diğer örümcekler gibi bisikletçi örümcek da koşabiliyor ama bir dizi takla atarak ve yerde yuvarlanarak da ileri doğru hareket edebiliyor. Prof. Rechenberg bu örümceği keşfettiğinden beri, bu hareket dizilerini teknolojik uygulamalara aktarmak için çalışıyor. Kinematikler ve tahrik konsepti Festo’nun biyonik ekibi ile işbirliği yapılarak geliştirildi. BionicWheelBot gövdesinin her iki yanında yer alan, üç uzun bacağa sahip bir tekerlekle yerde yuvarlanıyor. Koşu esnasında geri çekilen iki bacak, dönme hareketi için uzuyor. Örümcek top gibi yuvarlanırken bu bacaklar yeri itiyor ve sürekli dönme hareketi esnasında ileri doğru yol alıyor.
BionicFlyingFox – Otomatik öğrenme sayesinde ideal uçuş yolu
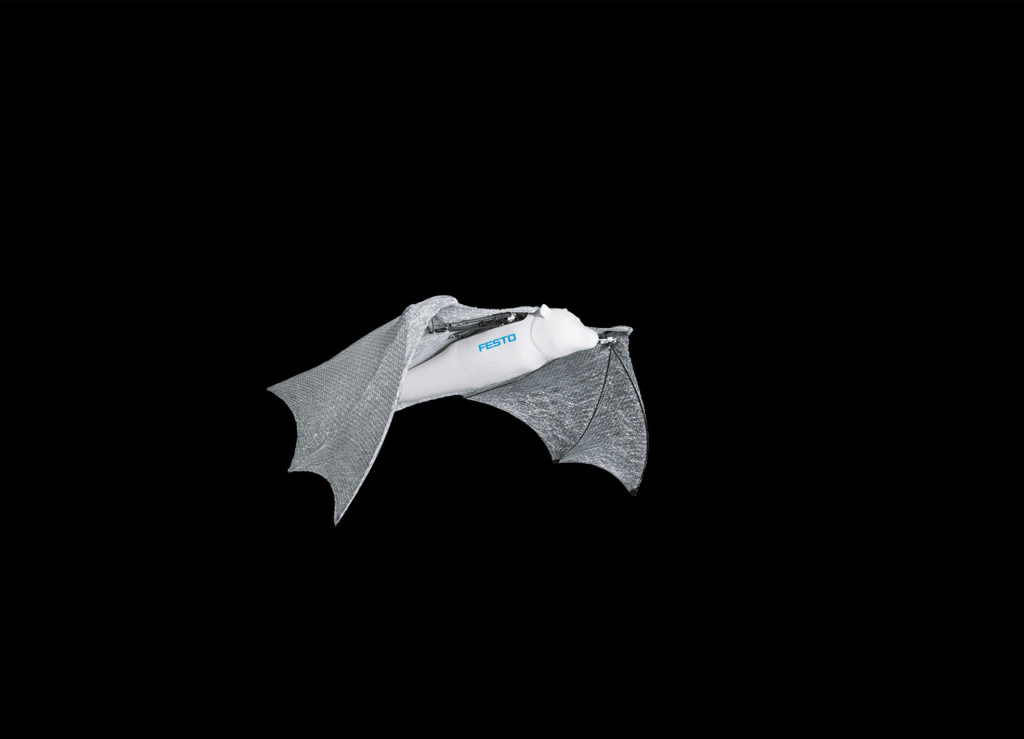
BionicFlyingFox’un kanat kinematik sistemleri, doğal uçan tilkiyi mümkün olduğu kadar gerçekçi şekilde taklit etmek için, ana ve ikincil unsurlara ayrılmıştır; tüm bağlantılar aynı düzlemde yer alır. Kanatlar ayaklara kadar uzanan esnek bir membranla kaplanmıştır. Bu uçan membran, zar gibi ince ve çok hafif, fakat aynı zamanda güçlüdür.
Yarı bağımsız uçuş için hareket izleme sistemi
BionicFlyingFox, tanımlanmış bir bölgede yarı bağımsız olarak hareket edebilmek için hareket izleme sistemiyle haberleşir. İki infrared kameralı sistem, sürekli olarak konumunu kaydeder. Bir yatay/dikey kaydırma-yatırma ünitesine monte edilen kameralar, yerden BionicFlyingFox’un tüm uçuşunu izleyecek şekilde döndürülebilir ve yatırılabilir. Aynı zamanda, hareket izleme sistemi uçuş yollarını planlar ve gerekli kontrol komutlarını düzenler. Havalanma ve yere inme insan operatör tarafından yaptırılır, otomatik pilot uçuş esnasında devreye girer.
İdeal uçuş yolu için otomatik öğrenme
Kameralardan gelen görüntüler, verileri değerlendiren ve uçuşu hava trafik kontrolörü gibi harici olarak koordine eden merkezi ana bilgisayara iletilir. Bilgisayara kaydedilen önceden programlanmış uçuş rotaları, BionicFlyingFox tarafından kendi manevralarını yaparken aldığı yolu belirtir. Hedeflenen hareket dizilerini ideal şekilde uygulamak için gereken kanat hareketleri, kendi gövdesine yerleştirilen elektronik devrelerin ve karmaşık davranış modellerinin yardımıyla yapay uçan tilkinin kendisi tarafından hesaplanır. BionicFlyingFox, gerekli kontrol algoritmalarını, otomatik olarak öğrenildikleri ve sürekli olarak geliştirildikleri ana bilgisayardan alır. BionicFlyingFox böylece uçuş sırasında kendi davranışını optimize ederek belirlenmiş yolları uçuş hareketi yapan her bir devreyle birlikte daha hassas şekilde takip edebilir.
Çeşitli farklı uygulamalar için yenilikçi uçan membran
Yenilikçi uçan membran, bu biyonik ekibi tarafından BionicFlyingFox için özel olarak geliştirilmiş. İki adet hava geçirmez folyo ve yaklaşık 45.000 noktada kaynak yapılmış dokuma elastan kumaştan ibarettir. Kumaşın balpeteği yapısı, uçan membrandaki küçük çatlakların büyümesini engeller. Böylece BionicFlyingFox, kumaş küçük bir hasara maruz kalsa bile uçmaya devam edebilir. Esnekliği sayesinde, kanatlar geri çekildiğinde bile uçan membran neredeyse tamamen kırışıksız kalır. Folyo sadece esnek olmayıp, aynı zamanda hava geçirmez ve hafif olduğundan, potansiyel olarak diğer uçan nesnelerde veya elbise tasarımı için veya mimari alanında da kullanılabilir.
Biyonik Öğrenme Ağı
On yıldan uzun bir süre önce, Festo şirket dahilinde inovasyon süreçleriyle yakından bağlantılı olan Biyonik Öğrenme Ağını başlattı. Festo, öğrencilerle, tanınmış üniversitelerle, enstitülerle ve geliştirme şirketleriyle işbirliği içerisinde projeleri, test yataklarını ve teknoloji platformlarını finanse etmektedir. Amaç, yeni teknolojiler için bir esin kaynağı olarak biyonikten yararlanmak ve bunları endüstriyel otomasyonda gerçekleştirmektir.
İlgili yazılar


This Post Has 0 Comments